
Changchang Wu
wucc1130(at)gmail.com
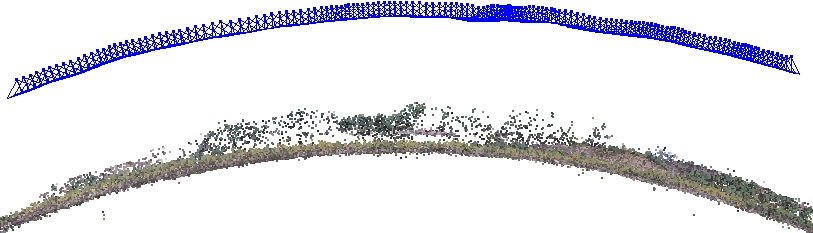
Critical Configuration for Radial Distortion Self-Calibration
This paper studies the configurations of motion and structure that lead to inherent ambiguities in radial distortion estimation (or 3D reconstruction with unknown radial distortions). The impact of the radial distortion ambiguity on multi-view reconstruction is demonstrated with synthetic experiments and real experiments.
Changchang Wu, "Critical Configurations for Radial Distortion Self-Calibration", CVPR 2014 (oral)
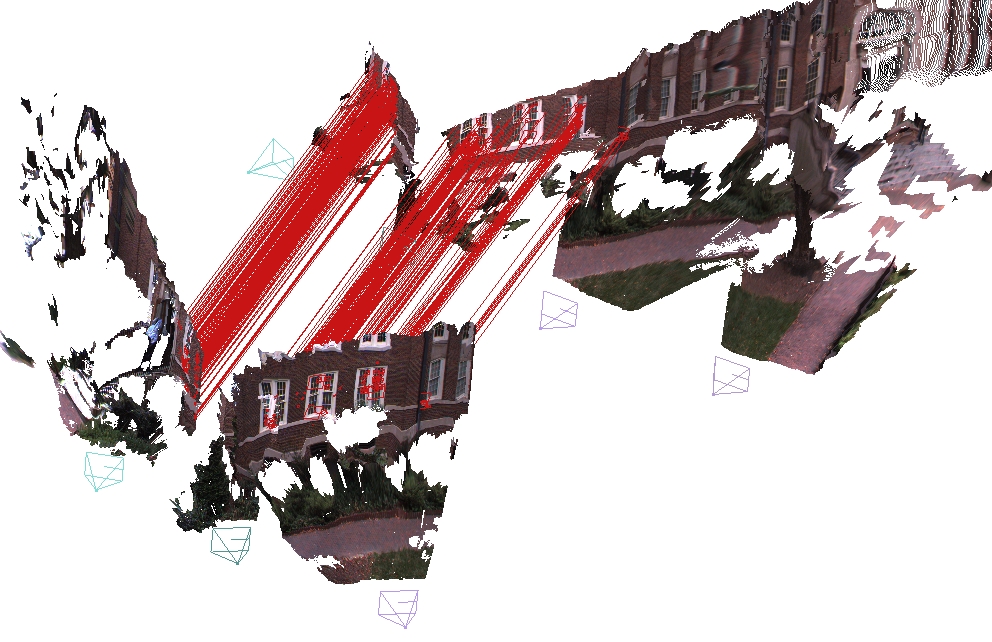
Towards Linear-time Incremental Structure from Motion
This papers details some algorithm design of VisualSFM. The time complexity of incremental SfM is often known as O(n^4) with respect to the number of cameras. This paper shows the design of an incremental SfM that requires only O(n) time on many major steps including BA. The algorithm is tested on large photo collections and long video sequences, and demonstrates state of the art performance for large-scale reconstructions.
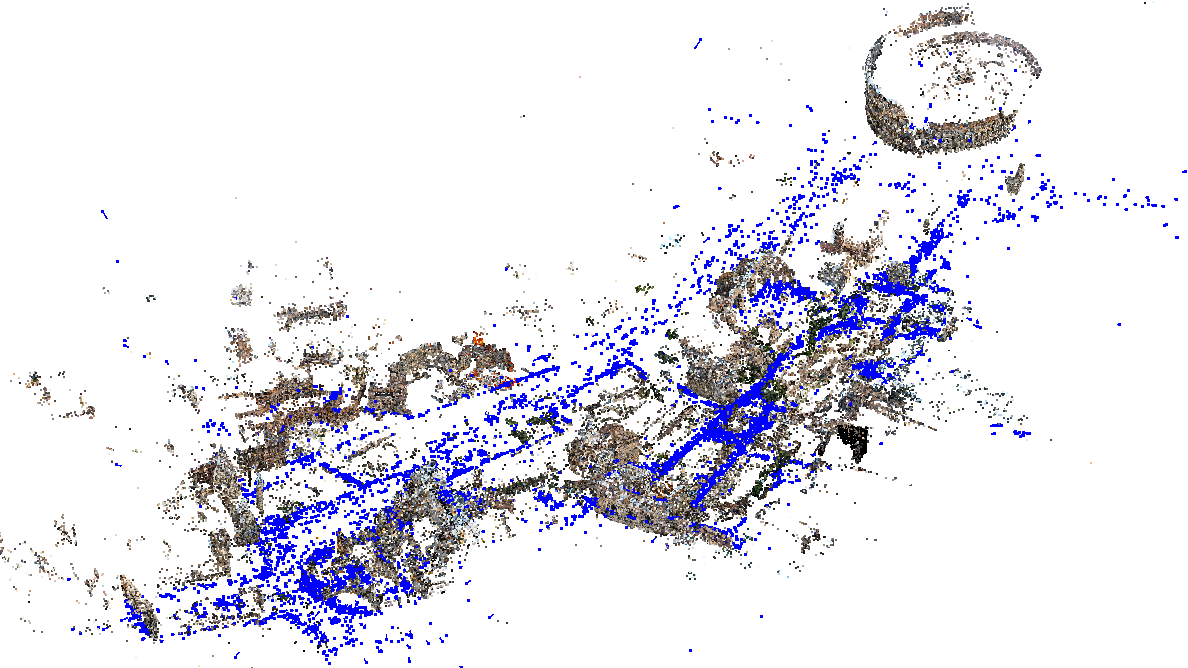
Changchang Wu, "Towards Linear-time Incremental Structure from Motion", 3DV 2013,(webpage, supplemental, video, poster)
Schematic Surface Reconstruction
This paper introduces a schematic representation for architectural scenes together with robust algorithms for reconstruction from sparse 3D point cloud data. The representation is extremely concise, composed of a handful of planar curves, and easily interpretable by humans.

Changchang Wu, Sameer Agarwal, Brian Curless, Steven M. Seitz, "Schematic Surface Reconstruction", CVPR 2012 (webpage, video)
Multicore Bundle Adjustment
We present
the design and implementation of new inexact Newton
type Bundle Adjustment algorithms that exploit hardware
parallelism for efficiently solving large scale
3D scene reconstruction problems.
Our CPU based system is up to ten times and our
GPU based system is up to thirty times faster than
the
current state of the art methods, while maintaining
comparable convergence behavior.
Changchang Wu, Sameer Agarwal, Brian Curless, Steven M. Seitz, "Multicore Bundle Adjustment", CVPR 2011 (project/code webpage, poster)
Repetition-based Dense Single-view Reconstruction
We present a novel approach for dense reconstruction from a single-view of a repetitive scene structure. We develop a MRF-based framework to balance the high-level constraint of geometric repetition/symmetry, and the standard constraints of the photometric consistency and the spatial smoothness of the reconstructed scene.



Changchang Wu, Jan-Michael Frahm, Marc Pollefeys, "Repetition-based Dense Single-View Reconstruction", CVPR 2011 (code, video, poster )
Detecting Large Repetitive Structures
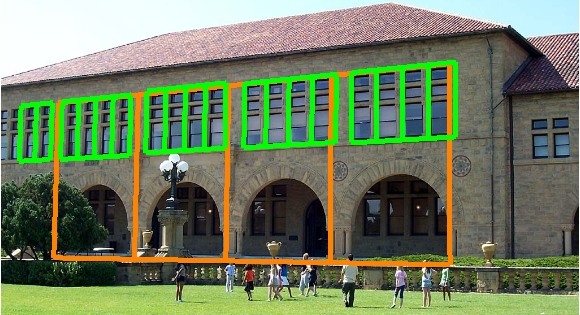

This paper proposed a novel robust and efficient framework to analyze large repetitive structures in urban scenes. A particular contribution of the approach is that it finds the salient boundaries of the repeating elements even when the repetition exists along only one direction.
Changchang Wu, Jan-Michael Frahm, Marc Pollefeys, " Detecting Large Repetitive Structures with Salient Boundaries", ECCV 2010( poster, video)
The code package for this project is available at repcode_v2.zip (GPL); the results and the labeling of the ZubuD dataset can be downloaded here(190MB)
3D Model Matching with Viewpoint Invariant Patches
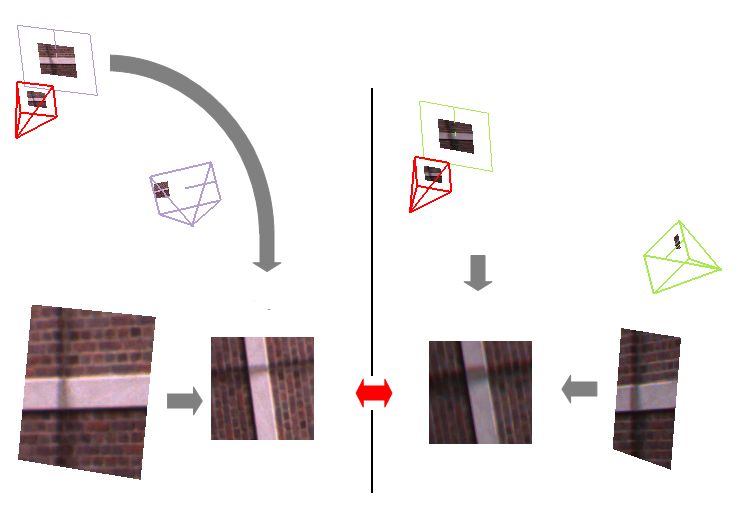
We have developed a novel class of viewpoint invariant features to deal with large viewpoint changes in 3D reconstruction. By leveraging the 3D geometry recovered from stereo, we extract features in the orthogonal view of 3D local patches to achieve projective invariance. The 3D information of each VIP feature determines the 3D similarity transformation from a single match, and allows us to develop an efficient 3D matching algorithm by testing hypotheses hierarchically.
Changchang Wu, Brian Clipp,
Xiaowei Li, Jan-Michael Frahm, Marc Pollefeys, "
3D Model Matching with Viewpoint
Invariant Patches (VIPs)", CVPR 2008 (oral, video ).
Changchang Wu, Friedrich Fraundorfer, Jan-Michael
Frahm and Marc Pollefeys, "3D Model Search and Pose
Estimation from Single Images using VIP Features",
S3D workshop in conjunction with CVPR 2008
The code package for this project is available at vipcode_v1.zip(GPL)
3D Reconstruction of Internet Photo Collections
I worked on the SfM part of the Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs and Building Rome on a Cloudless Day project. I worked on GPU feature detection, feature matching, incremental reconstruction, and bundle adjustment.